
この記事では,非線形関数の最適化問題を解く際に用いられるscipy.optimize.minimizeの実装を紹介する.minimizeでは,最適化のための手法が11個提供されている.ここでは,の分類に従って実装方法を紹介していく.
以下は関係のある記事.
・scipy.minimizeをすっきり書く書き方
分類
非線形関数の最適化問題を解く手法では,勾配ベクトル・ヘシアンの要,不要とパラメーターに制約が掛かるかどうかで手法の選択が分かれる.
1.非制約最適化問題.
1.1. 勾配ベクトル・ヘシアンが不要.
・ Nelder-Mead法
・ Powell法
1.2. 勾配ベクトルが必要.
・共役勾配法 (conjugate gradient method),
・BFGS法 (Broyden–Fletcher–Goldfarb–Shanno method)
1.3. 勾配ベクトル・ヘシアンが必要.
・ニュートン共役勾配法 (Newton conjugate gradient method)
・信頼領域ニュートン共役勾配法 (Newton conjugate gradient trust-region method)
・信頼領域dog-leg法 (dog-leg trust-region method)
2. 制約付き最適化問題
COBYLA法以外,勾配ベクトルが必要な手法.
2.1. パラメーターの範囲に制限がある場合.
・範囲制約付きメモリ制限BFGS法(L-BFGS-B)
・切断ニュートン共役勾配法(TNC)
2.2. 等式・不等式制約がある場合.
・COBYLA法 *(constrained optimization by linear approximation method)
・sequential least squares programming (SLSQP)
*不等式制約のみサポート
準備
実装のために,以下のmoduleをimportしておく.
import pandas as pd
import numpy as np
import matplotlib.pyplot as plt
%matplotlib inline
import seaborn as sns
sns.set(context="paper" , style ="whitegrid",rc={"figure.facecolor":"white"})
from scipy.optimize import minimize
import matplotlib.patches as mpatches
from mpl_toolkits.mplot3d import Axes3D
from matplotlib import cm
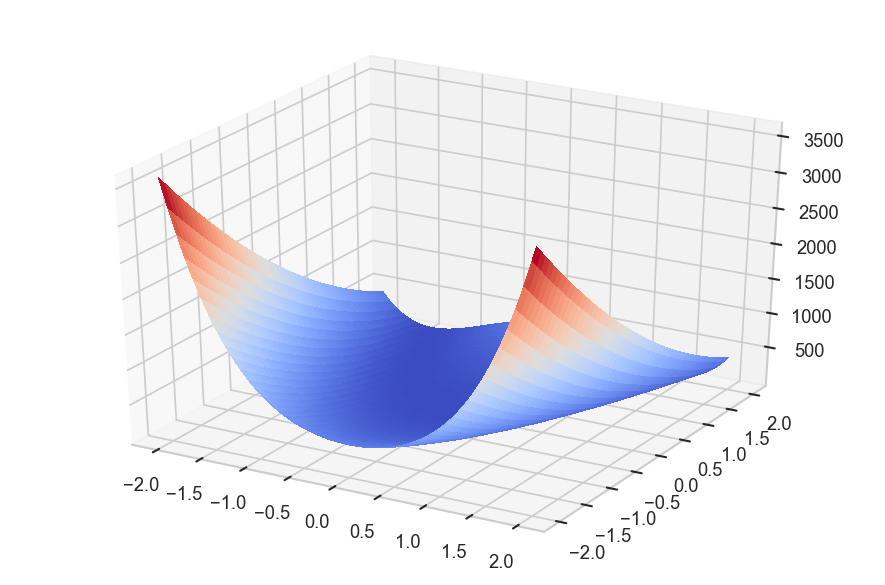
非線形関数としてはRosenbrock’s banana functionを用いる.scipy.optimizeの中にも関数は実装されているがargsの使い方も例示出来るように改めて自分で定義する.また,Rosenbrock’s banana functionの勾配ベクトルとヘシアンも定義しておく.
def f(x,args ):
v = (args[0] - x[0])**2 + args[1]*(x[1] - x[0]**2)**2
return(v)
def grad(x,args):
delx = 2*(x[0]- args[0]) + 4*args[1]*x[0]*(x[0]**2 - x[1])
dely = 2*args[1]*(x[1] - x[0]**2)
g = np.array([delx,dely])
return(g)
def hess(x,args):
delxx = 2 + 12*args[1]*x[0]**2 - 4*args[1]*x[1]
delxy = -4*args[1]*x[0]
delyx = delxy
delyy = 2*args[1]
h = np.array([[delxx,delyx],[delxy,delyy]])
return(h)
args = (1,100)
x0 = [2,2]
ちなみにRosenbrock’s banana functionは次の式で与えられ,大域最小解は,(x,y) = (a,a) である.
$$
f(x,y) = (a-x)^2 + b(y-x^2)^2
$$
x = np.linspace(-2,2,100) y = np.linspace(-2,2,100) xx,yy = np.meshgrid(x,y) zz = f([xx,yy],args) fig = plt.figure(figsize=(6,4),dpi=150) ax = fig.add_subplot(111, projection='3d') ax.plot_surface(xx,yy,zz,cmap=cm.coolwarm,linewidth=0, antialiased=False) plt.tight_layout()
非制約最適化問題.
勾配ベクトル・ヘシアンが不要.
Nelder-Mead法
minimizeの一番の基本形.
result = minimize(fun = f,
x0=x0,
args = (args,),
method="Nelder-Mead")
print(result)
tolで推定の際の制度を指定できるが方法によってtolの扱いが変化する.また,optionで方法ごとに細かいパラメーターの調整とdispで推定が成功したかどうかを表示することが可能.
result = minimize(fun = f,
x0=x0,
args = (args,),
method="Nelder-Mead",
tol = 1e-1,
options={"disp":True})
Powell法
result = minimize(fun = f,
x0=x0,
args = (args,),
method="Powell")
print(result)
勾配ベクトルが必要.
共役勾配法 (conjugate gradient method)
勾配ベクトルをjacに引き渡す.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
method="CG")
print(result)
勾配ベクトルを指定しないことも出来る.その場合は,数値微分によってjacobianが評価される.jac=False にしなくとも,jacを渡さなければ数値微分によってjacobianが評価される.当然だが,jacobianを渡した方が推定の精度は良い.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac=False,
method="CG")
print(result)
BFGS法 (Broyden–Fletcher–Goldfarb–Shanno method)
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
method="BFGS")
print(result)
勾配ベクトル・ヘシアンが必要.
ニュートン共役勾配法 (Newton conjugate gradient method)
jacに勾配ベクトル, hessにヘシアンを渡す.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
hess = hess,
method="Newton-CG")
print(result)
最低限,勾配ベクトルは渡す必要あり.勾配ベクトルから数値微分によってヘシアンが評価される.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac = grad,
method="Newton-CG")
print(result)
信頼領域ニュートン共役勾配法 (Newton conjugate gradient trust-region method)
あとは,方法の引数変えるだけで実装可能です.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
hess = hess,
method="trust-ncg")
print(result)
信頼領域dog-leg法 (dog-leg trust-region method)
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
hess = hess,
method="dogleg")
print(result)
2. 制約付き最適化問題
パラメーターの範囲に制限がある場合.
範囲制約付きメモリ制限BFGS法(L-BFGS-B)
パラメーターの範囲をboundsにtupleで引き渡す.もし大量のパラメーターに同じ制約を付けさせたければ,((2,None),)*20 のようにすればよい.片側だけに制限を付ける場合は,Noneかnp.infを用いる.
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
bounds = ((2,None),(2,np.inf)),
method="L-BFGS-B")
print(result)
切断ニュートン共役勾配法(TNC)
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
bounds = ((2,None),) *2,
method="TNC")
print(result)
等式・不等式制約がある場合.
COBYLA法 (constrained optimization by linear approximation method)
勾配ベクトル・ヘシアンが不要な方法.COBYLA法は不等式制約のみを受け付ける.boundsも使えない.以下のように制約を与えるが,条件は "type":"ineq" にすると関数が非負にならないように調整する.つまり,x[0]-2 は x[0]-2 >= 0 になるように制限される.
cons = ({"type":"ineq","fun": lambda x: x[0] -2},
{"type":"ineq","fun":lambda x:x[1] - 5 })
result = minimize(fun = f,
x0=x0,
args = (args,),
constraints= cons,
method="COBYLA")
print(result)
sequential least squares programming (SLSQP)
boundsも等式制約もつけられる手法.
cons = ({"type":"ineq","fun": lambda x: x[0] - 2},
{"type":"eq","fun":lambda x:x[1] - x[0] })
result = minimize(fun = f,
x0=x0,
args = (args,),
jac= grad,
bounds = ((-1,None),) *2,
constraints= cons,
method="SLSQP")
print(result)
———-雑感(`・ω・´)———-
各手法に対して何を引数として与えるか,どうやって与えるか,整理出来て良かったです.
参考文献
[1] 非線形最適化関数, 機械学習の Python との出会い, http://www.kamishima.net/mlmpyja/lr/optimization.html
[2] scipy.optimize.minimize, https://docs.scipy.org/doc/scipy-0.18.1/reference/generated/scipy.optimize.minimize.html
[3] Rosenbrock function, https://en.wikipedia.org/wiki/Rosenbrock_function
コメント
[…] 以下は関係する記事.・非線形最適化関数scipy.minimizeの各手法の実装例 ・[python] Logistic Regressionを用いてOdds Ratioを求める […]